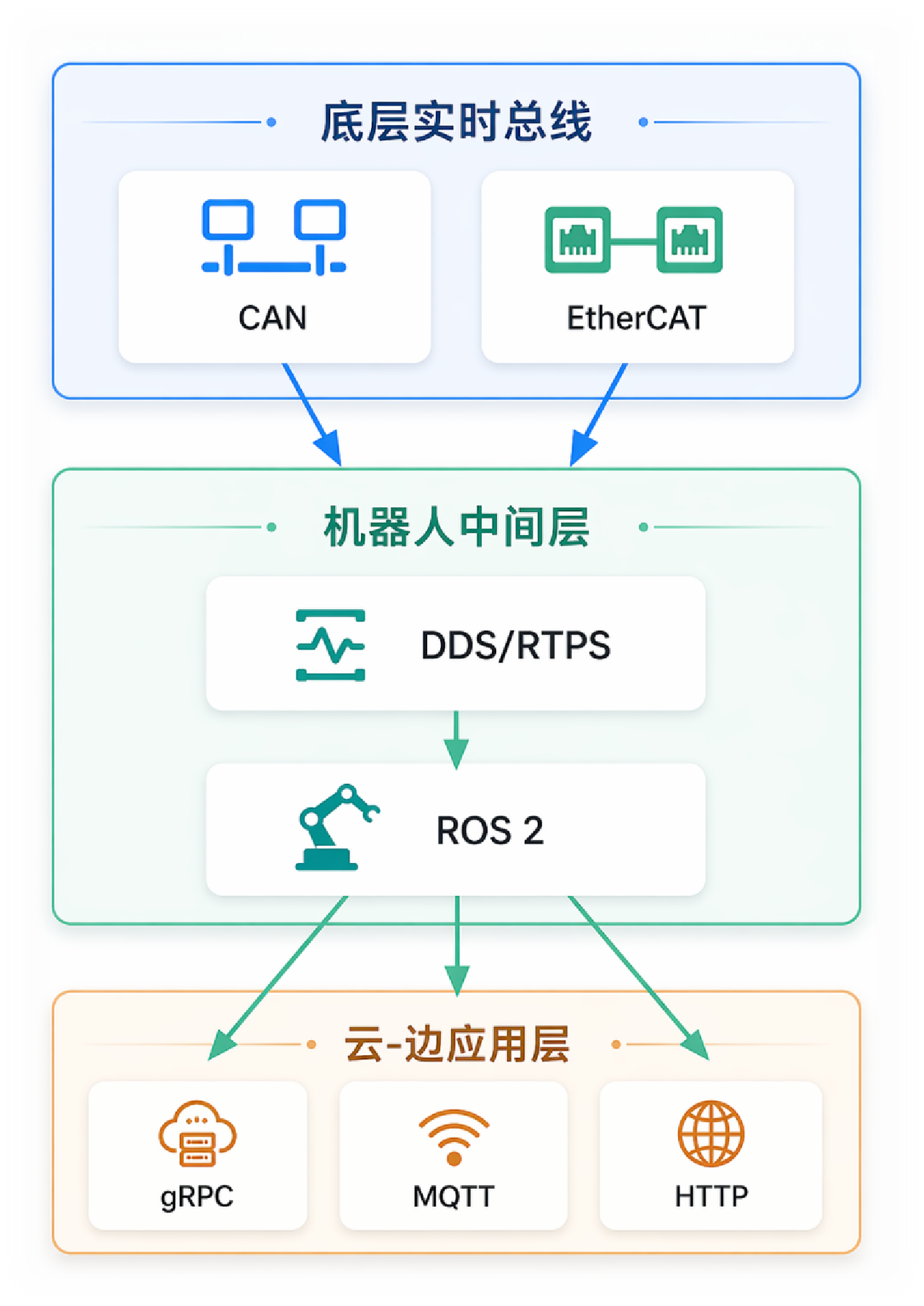
具身智能机器人的通信协议跨越三个层次:底层实时总线(EtherCAT / CAN)、机器人中间件层(DDS / RTPS + ROS2)、云-边应用层(HTTP / MQTT / gRPC)。网测仪表覆盖实时总线层、机器人中间件层、云-边应用层,提供协议仿真、性能测试、安全评估的完整解决方案。
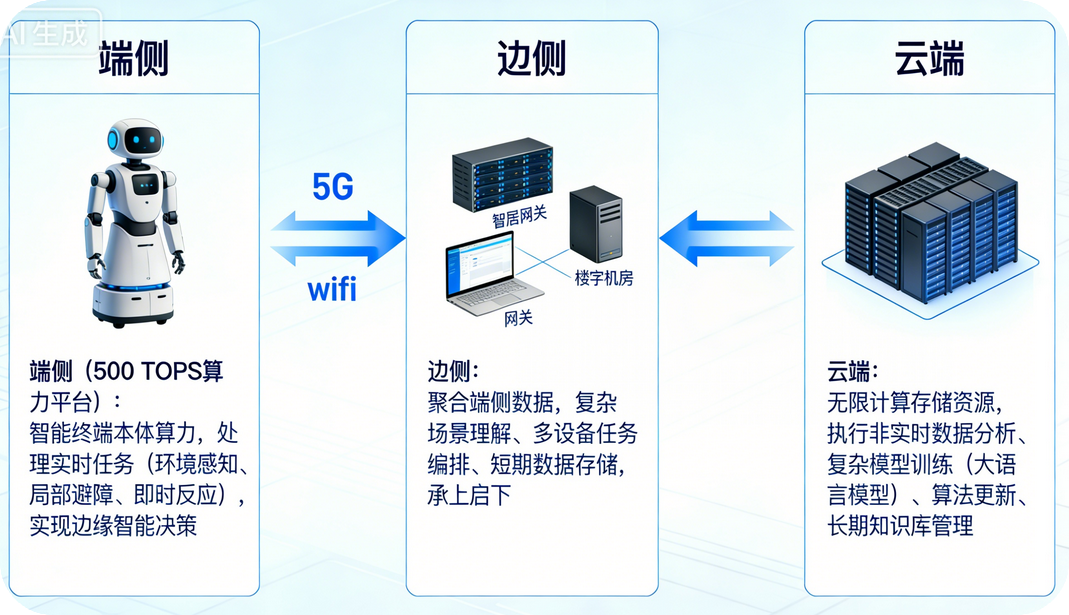
现代具身智能机器人采用"云-边-端"三级架构:机器人本体(端)实时控制,边缘节点实时推理,云端大模型编排与管理。网测仪表在三层均提供协议仿真测试能力,并通过 SuperWAN 复现 5G / WiFi / 有线网络的真实复杂信道条件。
具身智能机器人联网部署面临 DDoS 攻击、协议漏洞、身份伪造等多维度安全威胁。网测仪表以 91 种攻击类型、116 种协议模糊测试、133,474 个漏洞特征为基础,对机器人通信接口进行全面安全评估。
底层总线(EtherCAT / CAN)→ 中间件(DDS / ROS2)→ 云边应用(HTTP / MQTT / gRPC)三层一站式仿真测试,覆盖 292 种协议和 291 种流量类型。
FPGA 硬件加速,时延测量精度达 4 ns(2-3 层)/ 2.5 ns(4-7 层)。
SuperWAN 网络损伤仿真复现 5G / WiFi / 有线信道极端条件;支持单机 / 集群 / 云边协同等多种仪表部署模式。
内置 91 种攻击仿真 + 116 种协议模糊测试 + 133,474 漏洞特征库;支持 IEC 62443 合规评估;国密 SM2/SM4/SM3 全链路加密验证。
具身智能执行复杂任务涉及感知、决策、运动控制与灵巧操作等多项关键技术,需要开展系统化能力评估。核心技术以多模态感知、任务决策与规划、运动控制、灵巧操作和具身模型泛化能力为基础,支撑机器人完成复杂任务的感知、执行与闭环反馈。
地址:北京市海淀区上地信息产业基地开拓路1号B座2层2006
地址:河南省安阳市安阳县示范区通航产业研发孵化中心A座3楼315
商务合作:010-82790900
产品咨询:15566456615(微信同号)
邮箱:sales@netitest.com
关注我们

